สเต็ปเปอร์มอเตอร์ Nema 34 (86 มม.)
>> คำอธิบายสั้น ๆ
| ประเภทมอเตอร์ | สเต็ปเปอร์ไบโพลาร์ |
| มุมขั้น | 1.8° |
| แรงดันไฟฟ้า (V) | 2.8 / 3 / 3.9 / 4.8 / 5.4 / 6 |
| ปัจจุบัน (A) | 6 |
| ความต้านทาน (โอห์ม) | 0.4 / 0.5 / 0.65 / 0.8 / 0.9 / 1 |
| ความเหนี่ยวนำ (mH) | 2.2 / 4 / 5.4 / 8 / 9 / 11.5 |
| สายไฟ | 4 |
| โฮลดิ้งแรงบิด (Nm) | 3.5 / 4.5 / 7 / 8.5 / 10 / 12 |
| ความยาวมอเตอร์ (มม.) | 65 / 76 / 98 / 114 / 128 / 152 |
| อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
| อุณหภูมิสูงขึ้น | สูงสุด 80K |
| ความเป็นฉนวน | สูงสุด 1mA@ 500V, 1KHz, 1 วินาที |
| ความต้านทานของฉนวน | 100MΩ ขั้นต่ำ@500Vdc |
โรตารีสเต็ปเปอร์มอเตอร์มักใช้ในการใช้งานที่ต้องการการเคลื่อนที่ของการหมุนที่แม่นยำ เช่น อุปกรณ์ทางการแพทย์ เซมิคอนดักเตอร์ ระบบอัตโนมัติทางอุตสาหกรรม สิ่งทอ เครื่องมือทางวิทยาศาสตร์ ฯลฯ
ThinkerMotion มีโรตารี่สเต็ปปิ้งมอเตอร์แบบครบวงจร (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) พร้อมแรงบิดยึดตั้งแต่ 0.02Nm ถึง 12N.mการปรับแต่งสามารถประมวลผลได้ตามคำขอ เช่น ส่วนขยายเพลาเดี่ยว/คู่ การตัดเฉือนปลายเพลา เบรกแม่เหล็ก เครื่องเข้ารหัส กระปุกเกียร์ ฯลฯ
>> ใบรับรอง

>> พารามิเตอร์ทางไฟฟ้า
| ขนาดมอเตอร์ | แรงดันไฟฟ้า/ เฟส (วี) | หมุนเวียน/ เฟส (เอ) | ความต้านทาน/ เฟส (Ω) | ตัวเหนี่ยวนำ/ เฟส (mH) | จำนวน สายไฟ | ความเฉื่อยของโรเตอร์ (ก.ซม.2) | ถือแรงบิด (นาโนเมตร) | ความยาวมอเตอร์ L (มม.) |
| 86 | 2.8 | 6 | 0.4 | 2.2 | 4 | 1000 | 3.5 | 65 |
| 86 | 3 | 6 | 0.5 | 4 | 4 | 1300 | 4.5 | 76 |
| 86 | 3.9 | 6 | 0.65 | 5.4 | 4 | 2100 | 7 | 98 |
| 86 | 4.8 | 6 | 0.8 | 8 | 4 | 2500 | 8.5 | 114 |
| 86 | 5.4 | 6 | 0.9 | 9 | 4 | 3200 | 10 | 128 |
| 86 | 6 | 6 | 1 | 11.5 | 4 | 4000 | 12 | 152 |
>> พารามิเตอร์ทางเทคนิคทั่วไป
| กวาดล้างรัศมี | สูงสุด 0.02 มม. (โหลด 450g) | ความต้านทานของฉนวน | 100MΩ @ 500VDC |
| กวาดล้างตามแนวแกน | 0.08 มม. สูงสุด (โหลด 450g) | ความเป็นฉนวน | 500VAC, 1mA, 1s@1KHZ |
| โหลดรัศมีสูงสุด | 200N (20 มม. จากพื้นผิวหน้าแปลน) | ชั้นฉนวน | คลาส บี (80K) |
| โหลดตามแนวแกนสูงสุด | 50N | อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
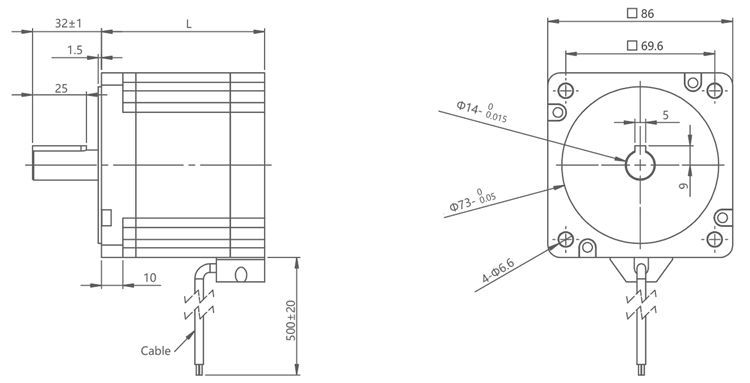
>> การวาดโครงร่างมอเตอร์ 86HS2XX-6-4A
>> เส้นโค้งความถี่แรงบิด
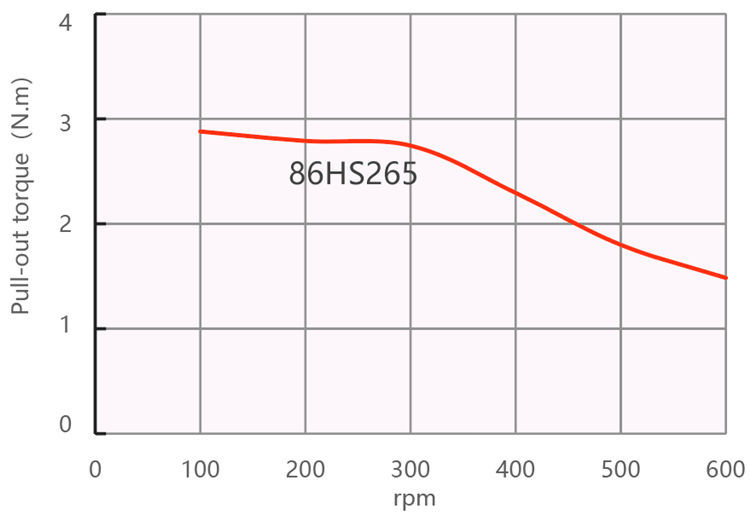
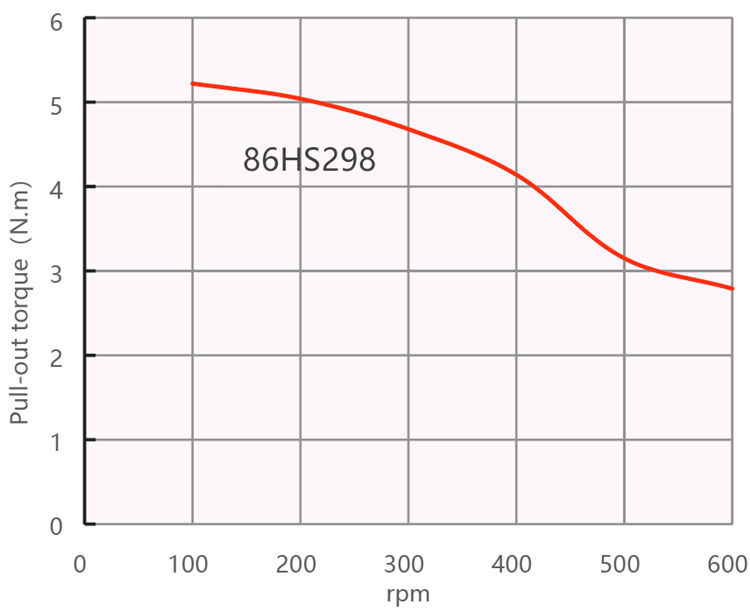
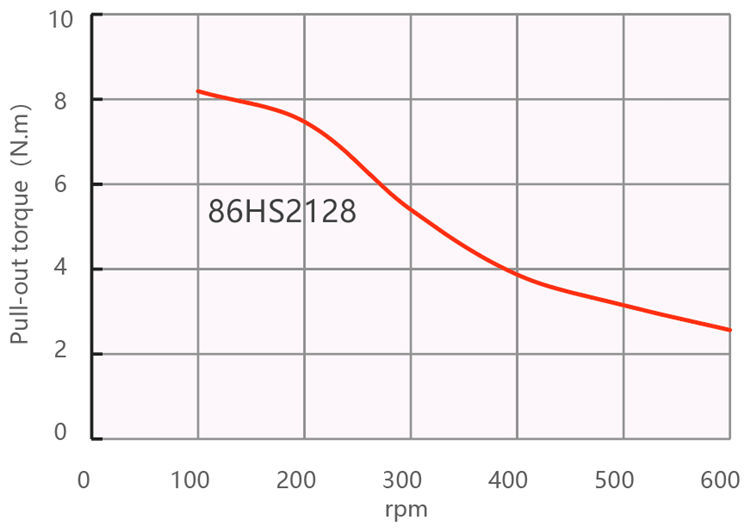
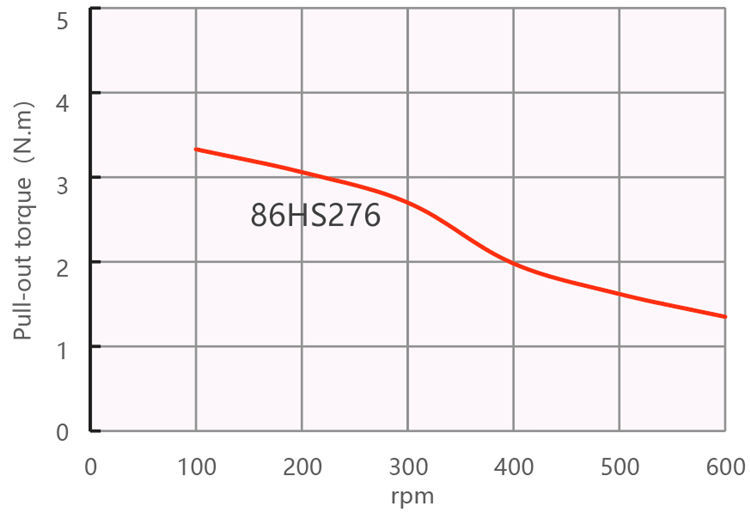
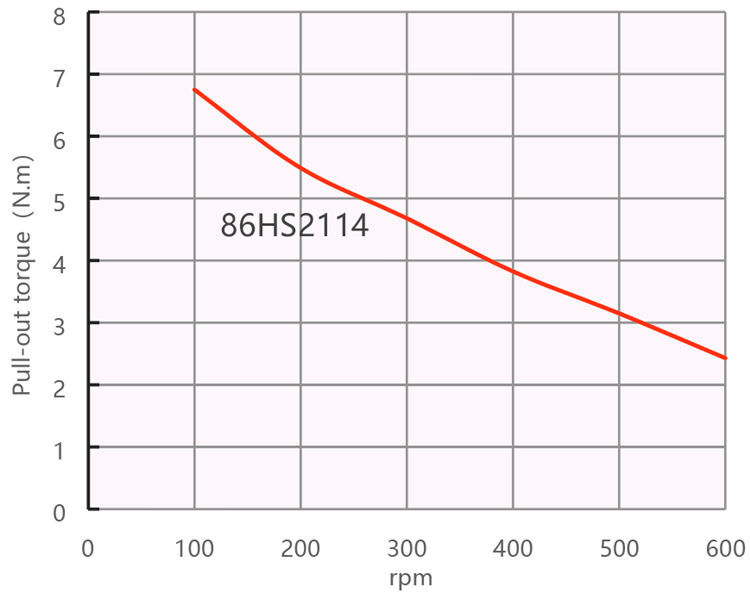
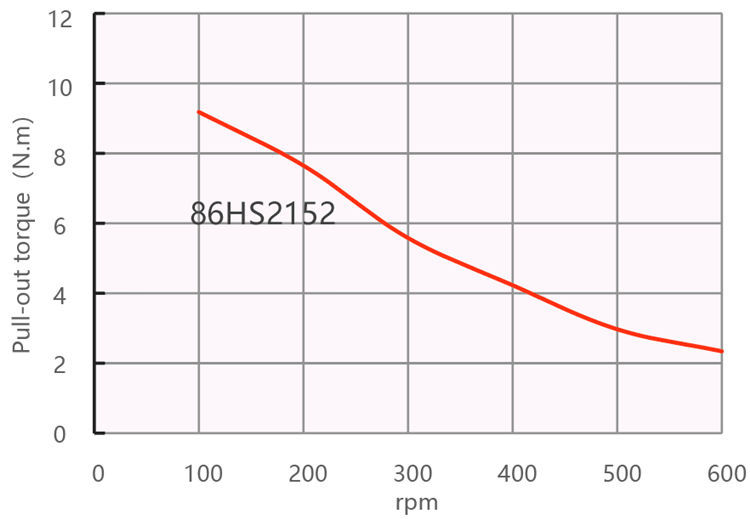
เงื่อนไขการทดสอบ:
ตัวขับชอปเปอร์ ครึ่งไมโครสเต็ปปิ้ง แรงดันของไดรฟ์ 40V