สเต็ปเปอร์มอเตอร์ Nema 24 (60 มม.)

>> คำอธิบายสั้น ๆ
| ประเภทมอเตอร์ | สเต็ปเปอร์ไบโพลาร์ |
| มุมขั้น | 1.8° |
| แรงดันไฟฟ้า (V) | 2.1 / 2.9 / 3.2 / 3.7 / 4.1 |
| ปัจจุบัน (A) | 5 |
| ความต้านทาน (โอห์ม) | 0.42 / 0.57 / 0.64 / 0.74 / 0.81 |
| ความเหนี่ยวนำ (mH) | 1.3 / 1.98 / 2.3 / 2.83 / 3.23 |
| สายไฟ | 4 |
| โฮลดิ้งแรงบิด (Nm) | 1.5 / 2.5 / 3 / 3.5 / 4 |
| ความยาวมอเตอร์ (มม.) | 55 / 75 / 84 / 100 / 112 |
| อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
| อุณหภูมิสูงขึ้น | สูงสุด 80K |
| ความเป็นฉนวน | สูงสุด 1mA@ 500V, 1KHz, 1 วินาที |
| ความต้านทานของฉนวน | 100MΩ ขั้นต่ำ@500Vdc |
ขนาด
20 มม. 28 มม. 35 มม. 42 มม. 57 มม. 60 มม. 86 มม
มุมสเต็ป
1.8°, 0.9°
Pประสิทธิภาพ
แรงบิดสูงสุดถึง 6N.m อุณหภูมิที่เพิ่มขึ้นต่ำ การสั่นสะเทือนต่ำ เสียงต่ำ อายุการใช้งานยาวนาน (สูงถึง 5 ล้านรอบ)
Aใบสมัคร
เครื่องมือวินิจฉัยทางการแพทย์ เครื่องมือวิทยาศาสตร์เพื่อชีวิต หุ่นยนต์ อุปกรณ์เลเซอร์ เครื่องมือวิเคราะห์ อุปกรณ์เซมิคอนดักเตอร์ อุปกรณ์การผลิตอิเล็กทรอนิกส์ อุปกรณ์อัตโนมัติที่ไม่ได้มาตรฐาน และอุปกรณ์อัตโนมัติประเภทต่างๆ
>> ใบรับรอง

>> พารามิเตอร์ทางไฟฟ้า
| ขนาดมอเตอร์ | แรงดันไฟฟ้า/ เฟส (วี) | หมุนเวียน/ เฟส (เอ) | ความต้านทาน/ เฟส (Ω) | ตัวเหนี่ยวนำ/ เฟส (mH) | จำนวน สายไฟ | ความเฉื่อยของโรเตอร์ (ก.ซม.2) | ถือแรงบิด (นาโนเมตร) | ความยาวมอเตอร์ L (มม.) |
| 60 | 2.1 | 5 | 0.42 | 1.3 | 4 | 340 | 1.5 | 55 |
| 60 | 2.9 | 5 | 0.57 | 1.98 | 4 | 590 | 2.5 | 75 |
| 60 | 3.2 | 5 | 0.64 | 2.3 | 4 | 690 | 3 | 84 |
| 60 | 3.7 | 5 | 0.74 | 2.83 | 4 | 850 | 3.5 | 100 |
| 60 | 4.1 | 5 | 0.81 | 3.23 | 4 | 960 | 4 | 112 |
>> พารามิเตอร์ทางเทคนิคทั่วไป
| กวาดล้างรัศมี | สูงสุด 0.02 มม. (โหลด 450g) | ความต้านทานของฉนวน | 100MΩ @ 500VDC |
| กวาดล้างตามแนวแกน | 0.08 มม. สูงสุด (โหลด 450g) | ความเป็นฉนวน | 500VAC, 1mA, 1s@1KHZ |
| โหลดรัศมีสูงสุด | 70N (20 มม. จากพื้นผิวหน้าแปลน) | ชั้นฉนวน | คลาส บี (80K) |
| โหลดตามแนวแกนสูงสุด | 15N | อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
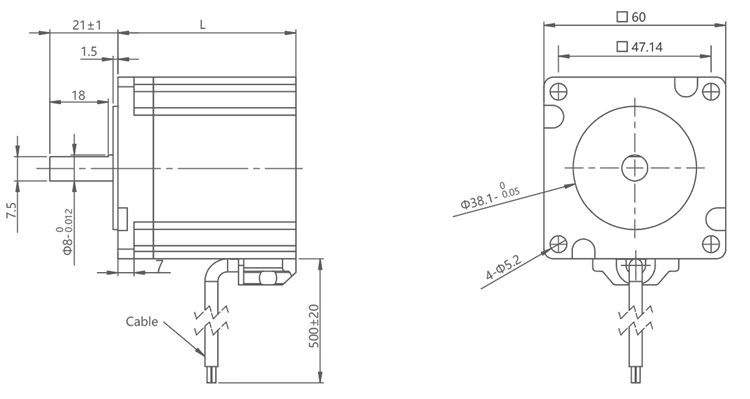
>> การวาดโครงร่างมอเตอร์ 60HS2XX-X-4A
>> เส้นโค้งความถี่แรงบิด
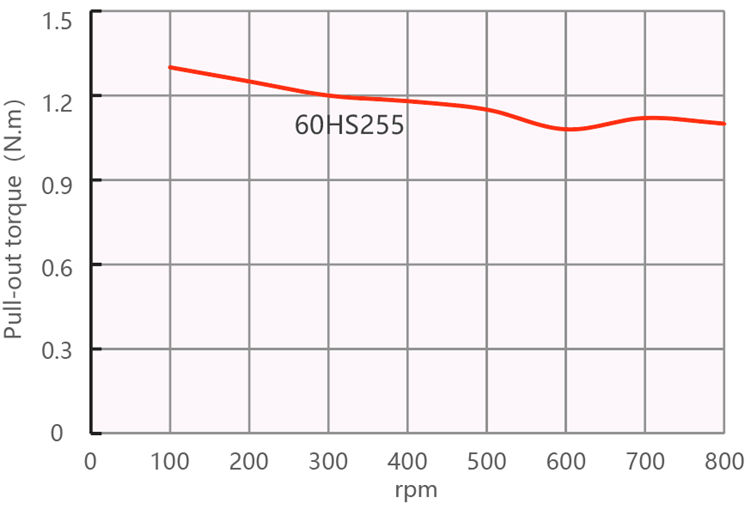
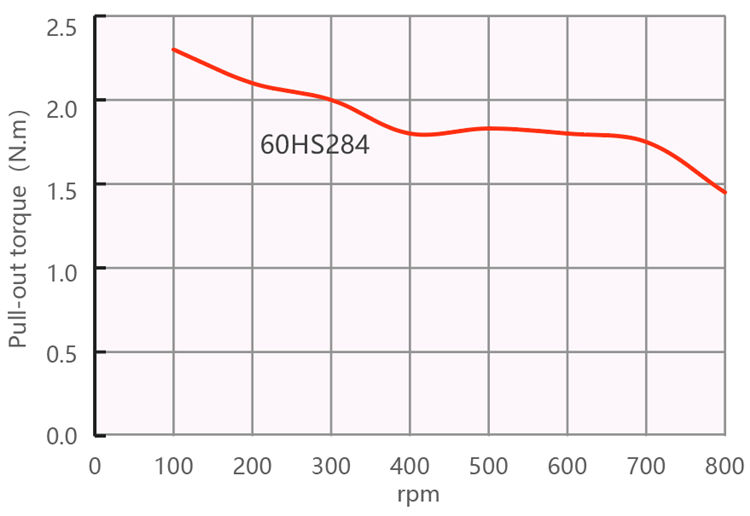
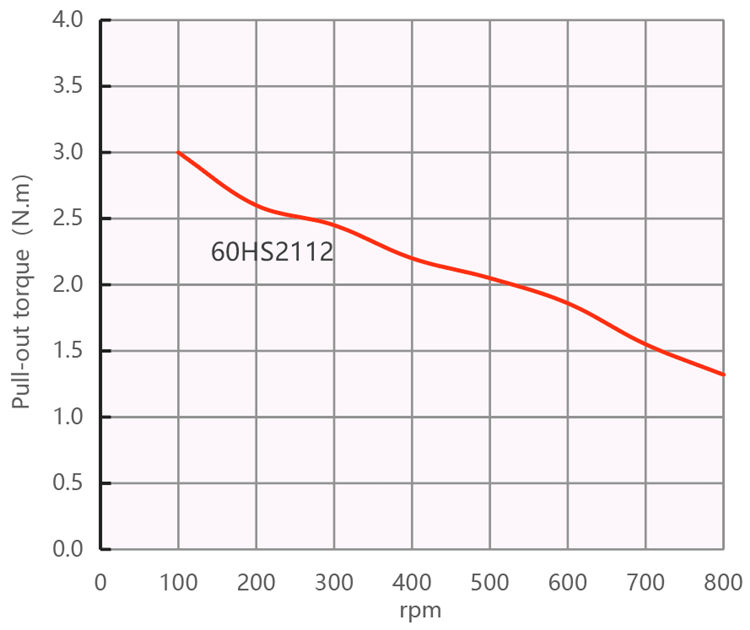
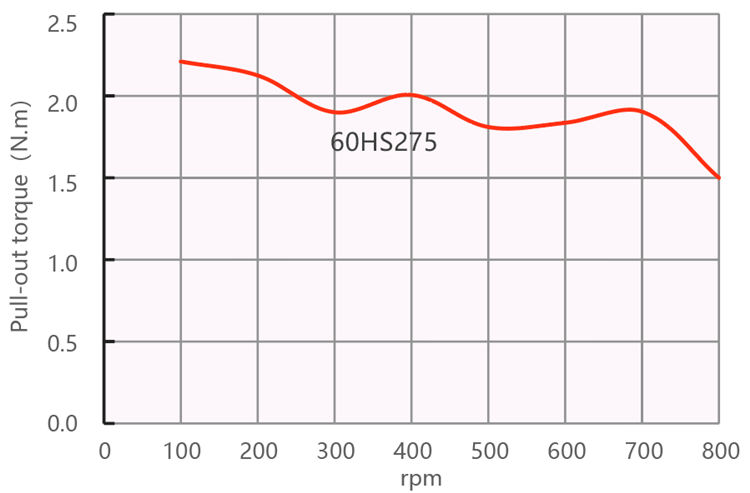
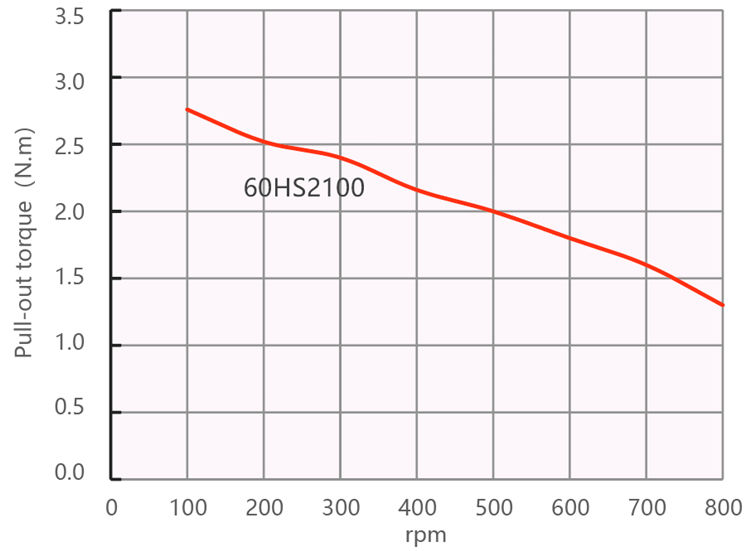
เงื่อนไขการทดสอบ:
ตัวขับชอปเปอร์ ครึ่งไมโครสเต็ปปิ้ง แรงดันของไดรฟ์ 40V