Nema 23 (57 มม.) มอเตอร์เกียร์ดาวเคราะห์

>> คำอธิบายสั้น ๆ
| ประเภทมอเตอร์ | สเต็ปเปอร์ไบโพลาร์ |
| มุมขั้น | 1.8° |
| แรงดันไฟฟ้า (V) | 2.1 / 2.6 / 3 / 3.6 / 3.8 / 4.1 |
| ปัจจุบัน (A) | 3 / 3 / 4 / 4 / 5 / 5 |
| ความต้านทาน (โอห์ม) | 0.71 / 0.86 / 0.76 / 0.9 / 0.75 / 0.81 |
| ความเหนี่ยวนำ (mH) | 1.9 / 2.6 / 3.2 / 4.5 / 3.2 / 4.6 |
| สายไฟ | 4 |
| โฮลดิ้งแรงบิด (Nm) | 0.7 / 1 / 1.5 / 1.8 / 2.5 / 3 |
| ความยาวมอเตอร์ (มม.) | 45 / 55 / 65 / 75 / 100 / 112 |
| อัตราส่วนการลด | 10 / 5 / 4 / 100 / 50 / 40 / 25 / 20 / 16 |
| อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
| อุณหภูมิสูงขึ้น | สูงสุด 80K |
| ความเป็นฉนวน | สูงสุด 1mA@ 500V, 1KHz, 1 วินาที |
| ความต้านทานของฉนวน | 100MΩ ขั้นต่ำ@500Vdc |
>> คำอธิบาย
ขนาด
20 มม. 28 มม. 35 มม. 42 มม. 57 มม. 60 มม. 86 มม
อัตราส่วนการลด
4~100
Pประสิทธิภาพ
แรงบิดขนาดใหญ่, ประสิทธิภาพสูง, อุณหภูมิที่เพิ่มขึ้นต่ำ, การสั่นสะเทือนต่ำ, เสียงต่ำ, การทำงานที่ราบรื่น, อายุการใช้งานยาวนาน, ความแม่นยำของตำแหน่งสูง
>> ใบรับรอง

>> พารามิเตอร์ทางไฟฟ้า
| ขนาดมอเตอร์ | แรงดันไฟฟ้า/ เฟส (วี) | หมุนเวียน/ เฟส (เอ) | ความต้านทาน/ เฟส (Ω) | ตัวเหนี่ยวนำ/ เฟส (mH) | จำนวน สายไฟ | ถือแรงบิด (นาโนเมตร) | ความยาวมอเตอร์ L (มม.) |
| 57 | 2.1 | 3 | 0.71 | 1.9 | 4 | 0.7 | 45 |
| 57 | 2.6 | 3 | 0.86 | 2.6 | 4 | 1 | 55 |
| 57 | 3 | 4 | 0.76 | 3.2 | 4 | 1.5 | 65 |
| 57 | 3.6 | 4 | 0.9 | 4.5 | 4 | 1.8 | 75 |
| 57 | 3.8 | 5 | 0.75 | 3.2 | 4 | 2.5 | 100 |
| 57 | 4.1 | 5 | 0.81 | 4.6 | 4 | 3 | 112 |
>> พารามิเตอร์ทางเทคนิคทั่วไป
| กวาดล้างรัศมี | สูงสุด 0.02 มม. (โหลด 450g) | ความต้านทานของฉนวน | 100MΩ @ 500VDC |
| กวาดล้างตามแนวแกน | 0.08 มม. สูงสุด (โหลด 450g) | ความเป็นฉนวน | 500VAC, 1mA, 1s@1KHZ |
| โหลดรัศมีสูงสุด | 70N (20 มม. จากพื้นผิวหน้าแปลน) | ชั้นฉนวน | คลาส บี (80K) |
| โหลดตามแนวแกนสูงสุด | 15N | อุณหภูมิโดยรอบ | -20℃ ~ +50℃ |
>> การวาดโครงร่างมอเตอร์ 57HS2XX-X-4AG
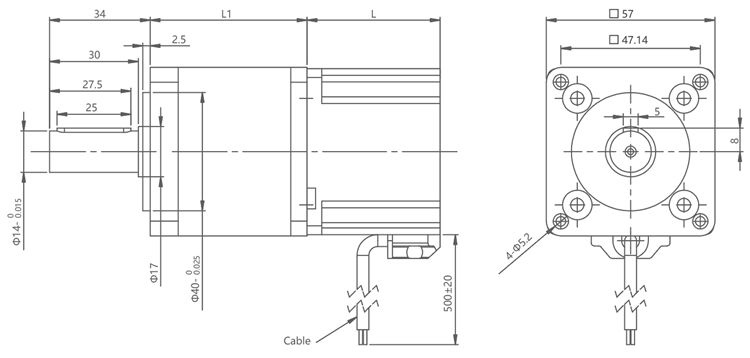
| ความยาวของกระปุกเกียร์ L1 (มม.) | อัตราส่วนการลด |
| 53 | 10/5/4 |
| 70 | 100/50/40/25/20/16 |